Team JellyMiu
PopupCAD Challenge

Checkpoint 1
Our goal is to emulate the motion of the jellyfish that enables it to travel. So, we chose the miura pattern to act as the "muscle" for the motion since it's tesselation pattern enables it to acturately mimic the natural propulsion of the jellyfish.
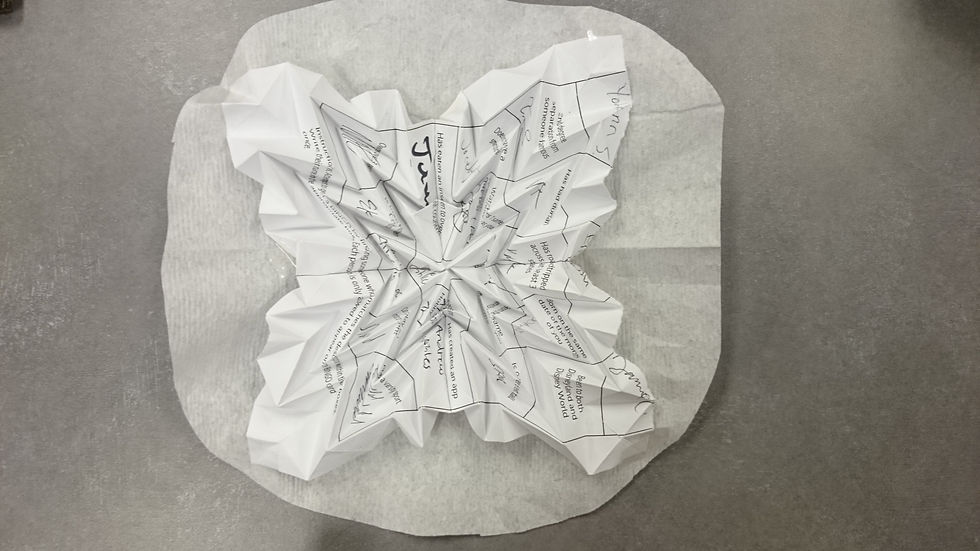
For our first prototype, we folded a radial miura pattern and added paper as the "skin" of the jellyfish. As shown in the video below, the pattern enables our prototype to emulate the contraction of a jellyfish when it swims.
Our next challenge was to actuate this motion.
Checkpoint 2
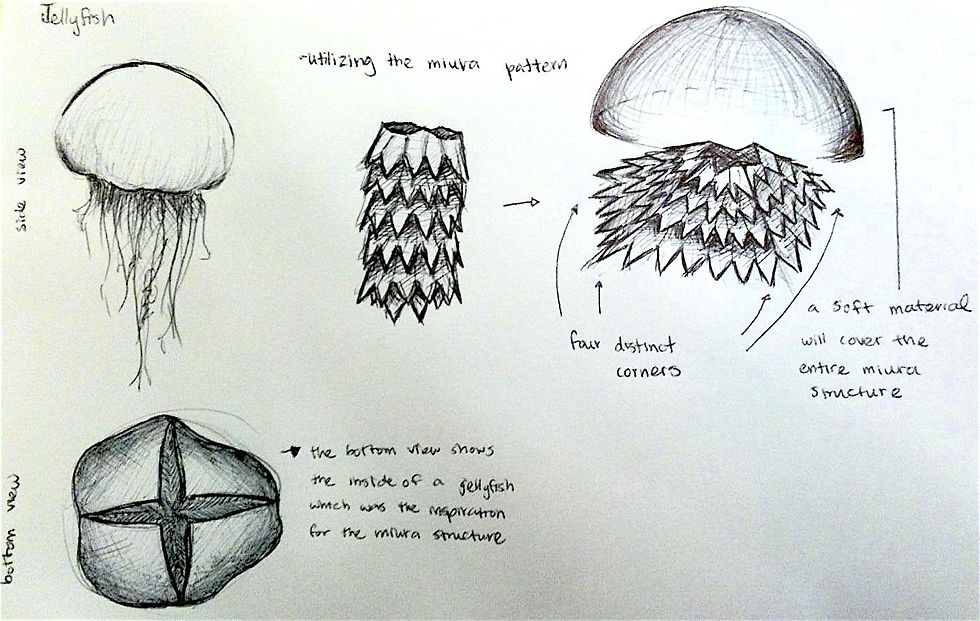
bottom view

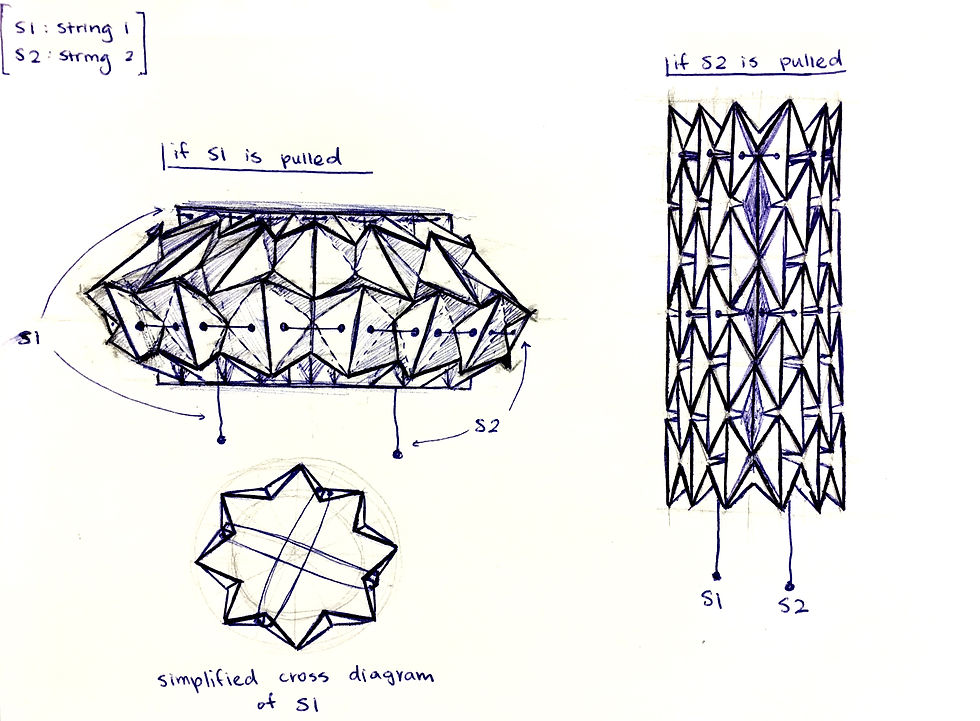
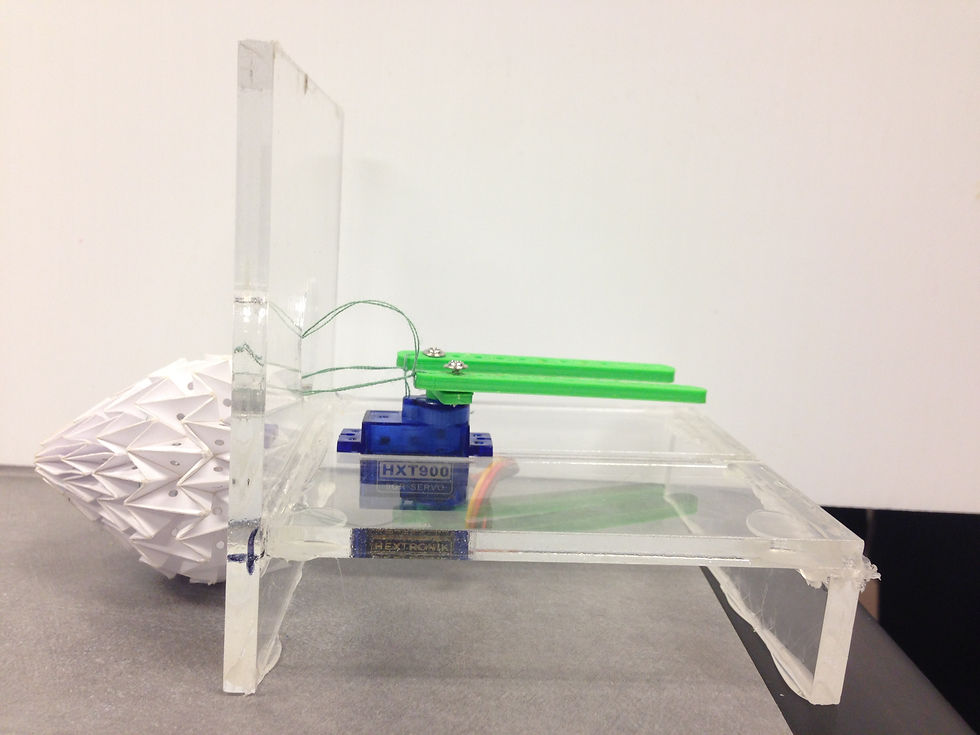
For our second prototype, we used the miura pattern to create a magic ball origami structure in order to actuate our prototype so that it can mimic the motion of a jellyfish. We etched the pattern onto paper and then manually folded it into the magic ball. We then threaded strings through the pattern in order to actuate it. We created an acrylic base to hold the prototype and the servo in place.
The advantage of this design is the actuation. This type of miura pattern allows us to actuate the origami using only a servo and wires passing through strategic points in the pattern that we selected by studying the motion of the magic ball.
The materials used for this quick proof concept prototype were a mini hobby servo, acrylic, paper, mini maestro pololu (servo controller) and sewing thread.
This type of actuation idea was an adaptation from the work made by the BioRobotics Laboratory, led by Professor Kyu-Jin Cho on the Deformable Origami Wheel.

The magic ball is attached to strings that are attached to green hinges which are attached to the servo.
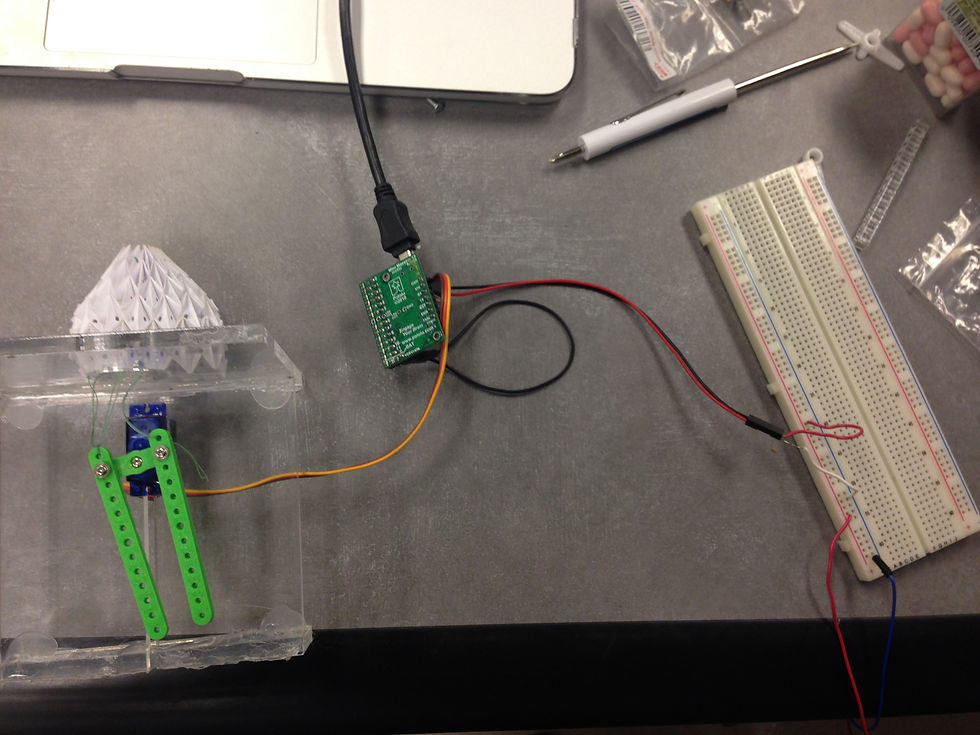
The servo is attached to a controller which is attached to a usb and a breadboard.
Checkpoint 3
In our previous prototype, we saw that although the miura pattern could mimic the motion of the jellyfish, it can be easily deformed which can result in alterations of its movement.
In order to reduce the degrees of freedom, unpredictable deformations, and to obtain more accurate linear motion, we took a different approach to this challenge from the previous prototypes. Observing how the Aquajelly by Festo moves (video on the right) we decided to apply a simmilar approach to mimic the natural propulsion of a jellyfish but with a different mechanism and actuation that can be easily adaptable to our current design constraints (e.g. waterproof), manufacturing process, and actuation method.
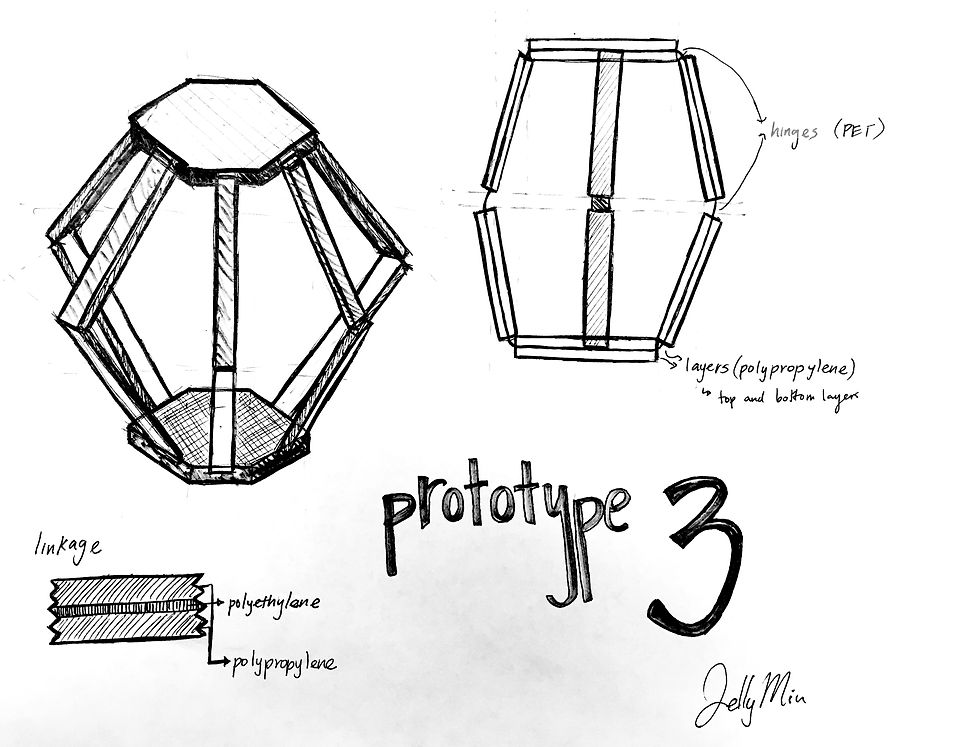
We chose and designed a Sarrus mechanism using lamiante manufacturing (images on right). It is made of layers of polypropylene, polyethylene, and double sided adhesive. The top and bottom layers are made of polypropylene which are the rigid layers. The middle, polyethlene layer is the flexible layer that acts as a hinge between the rigid bars. We chose polypropylene because it is waterproof and lightweight so it would allow our jellyfish to swim under water. (Please click here to check the manufacturing steps)
For our next step, we plan on using a Pneumatic Artificial Muscle (PAM) as a linear actuator.
Final Checkpoint
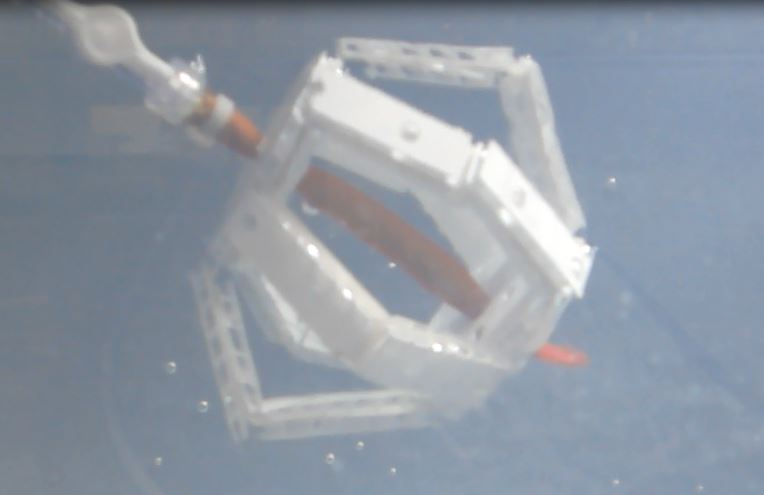
For our final prototype, we manufactured a smaller version of prototype 3 in order to test it in a small tank with a small actuator since it would be faster to make a smaller (1/4'' ID) PAM actuator with the available material.
The final prototype has the same structure as prototype 3 but it is 2x smaller.
We inserted the prototype into a tank of water to show the motion achieved from our waterproof jellyfish prototype.
See Results & Summary for addtional info.




With the PAM actuator (orange filament)